Sep 2020 - Jun 2024
FRC Team 4048 Redshift
Westborough High School FIRST Robotics Competition Team 4048 “Redshift.” The following information describes the robots built in different season by my team, run by me as Captain in 2024 and a design team lead member in the previous years.
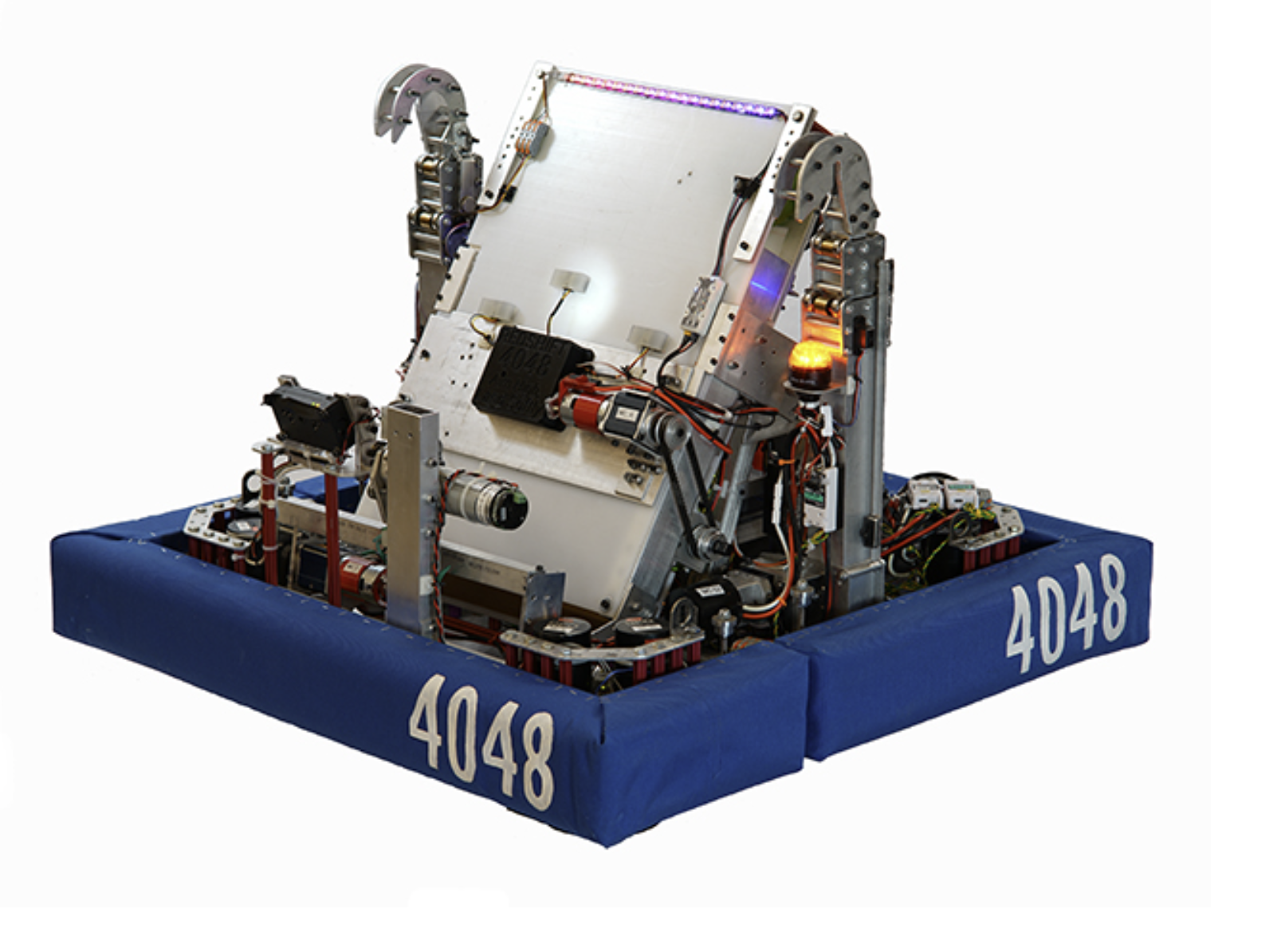

2024: Crescendo
FORTISSIMO
Retained SDS Mk4 swerve drives; upgraded from L1 to L2 gear ratio for increased top speed
Reduced robot footprint to 28" x 28" and limited height for unrestricted field traversal
Focused design on a subset of game objectives to maximize execution quality
COTS climber components to reduce development risk
Internal intake kept game pieces within the frame perimeter for protection against defense
Fast intake, driving, and shooting optimized for quick cycle times
Added LED indicators post-District Event 1 for drive team status feedback
Added swerve module boots to prevent game piece interference
Result: smaller, lighter, and simpler robot that outperformed previous iterations
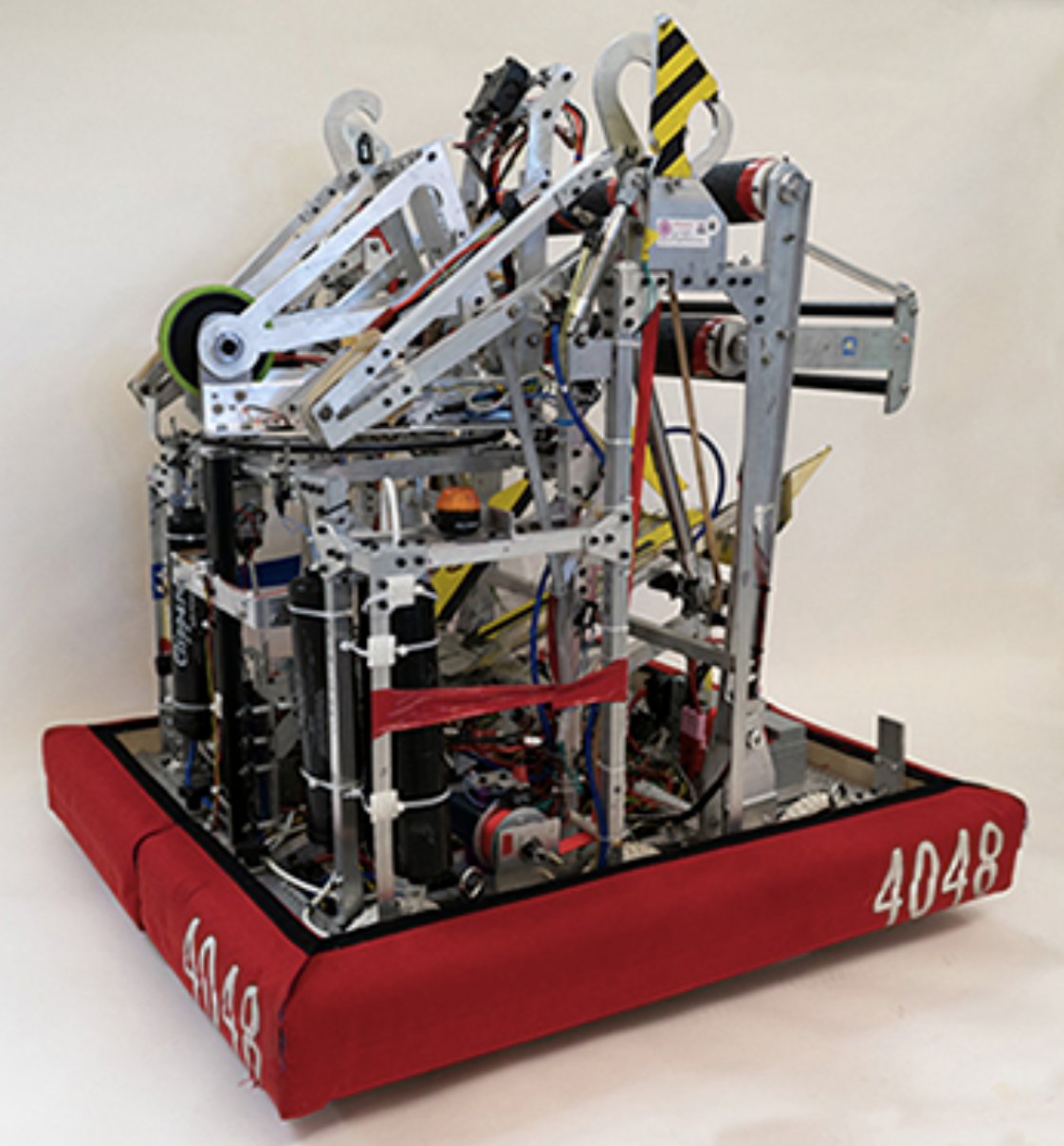
2023: Charged Up
FERBINATOR
SDS Mk4 swerve modules with Neo motors for agile navigation and driving accuracy
Single-stage arm extension with pincher end effector capable of handling both cones and cubes
Robot height built to 1/4" below the maximum allowed limit
Frame perimeter set to maximum 120" (30x30) for stability
Two undercarriage pipes allowed the robot to overhang the Charging Station edge by up to 12", freeing space for alliance partners during endgame balancing
Provisions added for lidar and 3D camera for future autonomous and machine vision development
32x32 LED panel added for driver-to-human-player communication across the field
2022: Rapid React
SPINISTER
62% new students (49% freshmen); KOP 6-wheel drop center chassis used to accelerate build timeline
Vision-tracking turret with single-shot shooter and pneumatically driven loader
Single-ball-at-a-time intake for controlled feed
Climber: two double-segmented arms with strap winches and static frame-mounted latches; robust enough to hold the robot on a single arm
Weight reduction through less metal, smaller fasteners (10-32 vs 1/4-20), and carbon fiber intake